Proportional coding: Difference between revisions
From wikiluntti
No edit summary |
No edit summary |
||
| Line 19: | Line 19: | ||
== Theory == | == Theory == | ||
<gallery> | |||
LinefollowerProp.png|The red and green lines do not pass origin, but show proportional relation. | |||
Proportional.png|The linefollowing robot uses proportionality | |||
GyroAngle.png|The proportionality is very important while driving to a given angle with the gyroscope. | |||
</gallery> | |||
Revision as of 20:57, 16 October 2020
Introduction
Very often proportionality is used in robotics programming. Proportionality is an important topic on mathematics curriculum. The proportionality means a straight line (with slope, or gradient, ) passing through the origin. In robotics, the slope is first translated to pass the origin.

Aim
Slope, straight line. Multiplication.
Robot
Almost any robot will do, we use here Asimov 2/ Verne robot.
Sensors
No sensors are used.
Example Video
Theory
-
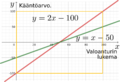
The red and green lines do not pass origin, but show proportional relation.
-

The linefollowing robot uses proportionality
-

The proportionality is very important while driving to a given angle with the gyroscope.

Exercises
Back to Mahtavaa Matematiikkaa 2020
