Simple ESP32 Drone Flight Controller: Difference between revisions
From wikiluntti
| Line 35: | Line 35: | ||
* https://www.hackster.io/Arnov_Sharma_makes/esp32-x-l293d-motor-board-a9a7af | * https://www.hackster.io/Arnov_Sharma_makes/esp32-x-l293d-motor-board-a9a7af | ||
* https://github.com/BeegCat/Motor_control_using_L293D_-HW-130-_shield/ | * https://github.com/BeegCat/Motor_control_using_L293D_-HW-130-_shield/ | ||
* https://www.electronicwings.com/esp32/dc-motor-interfacing-with-esp32 | |||
== Programming == | == Programming == | ||
Revision as of 23:22, 21 March 2026
Introduction
Make a drone with 4 BetaFPV motors, an accelerometer and ESP32 with motor controllers.
Motors: BetaFPV 19000KV Brushed Motors (2CW+2CCW)
- Dimensions: 7x16mm
- Length of the wires; 50mm
- Shaft diameter 0.8mm
- Mass 2.95g (without wires and sockets)
- RPM 19000KV
- Voltage 3.7V
- Socket JST 1.25mm 2P
Frame
-
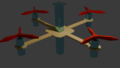
The idea.

Light plywood frame, which is allowed to move up and down only. Horizontal movement is restricted. Cables.
Electronics
Introduction
Motor controllers
Schematics
References
- https://www.hackster.io/Arnov_Sharma_makes/esp32-x-l293d-motor-board-a9a7af
- https://github.com/BeegCat/Motor_control_using_L293D_-HW-130-_shield/
- https://www.electronicwings.com/esp32/dc-motor-interfacing-with-esp32